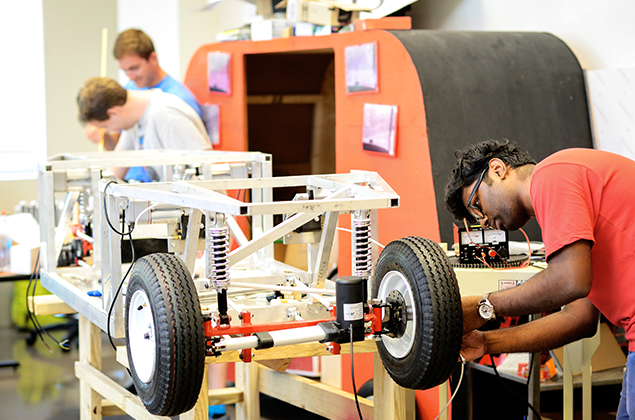
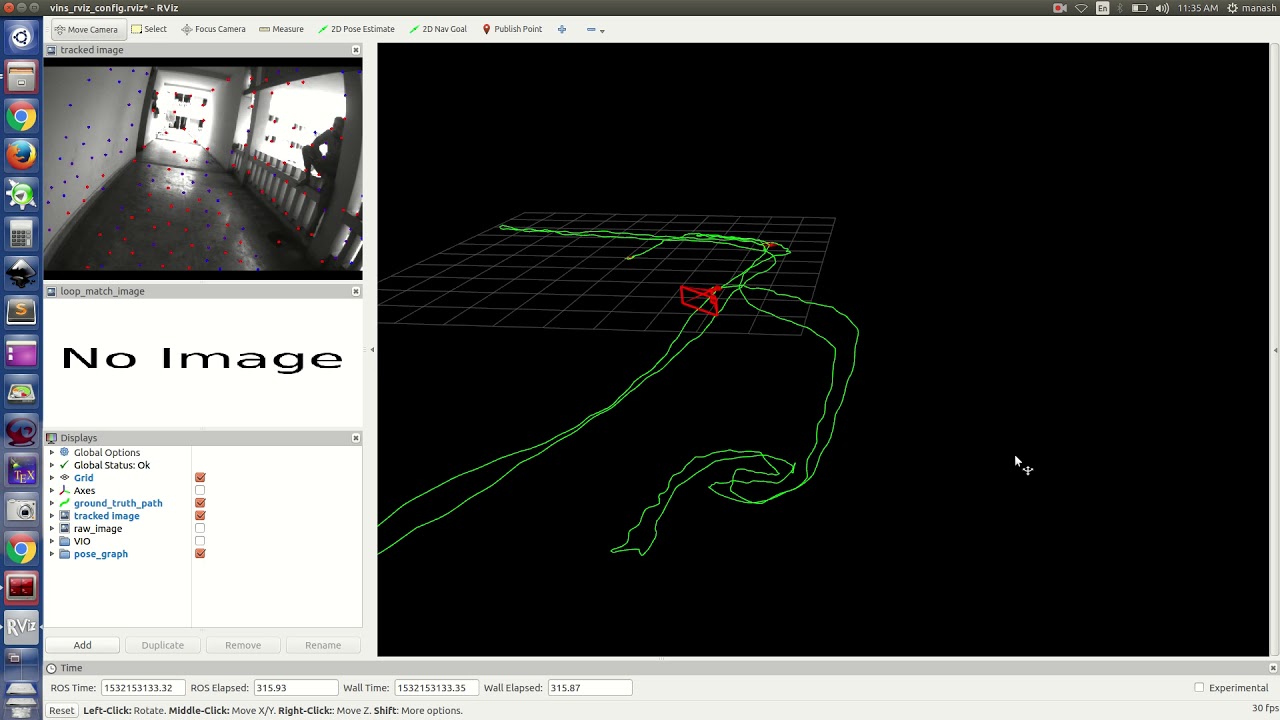
VINS-MONO SLAM
Worked on visual and visual-inertial SLAM for navigation and localization of self-driving vehicle [VINS Mono]
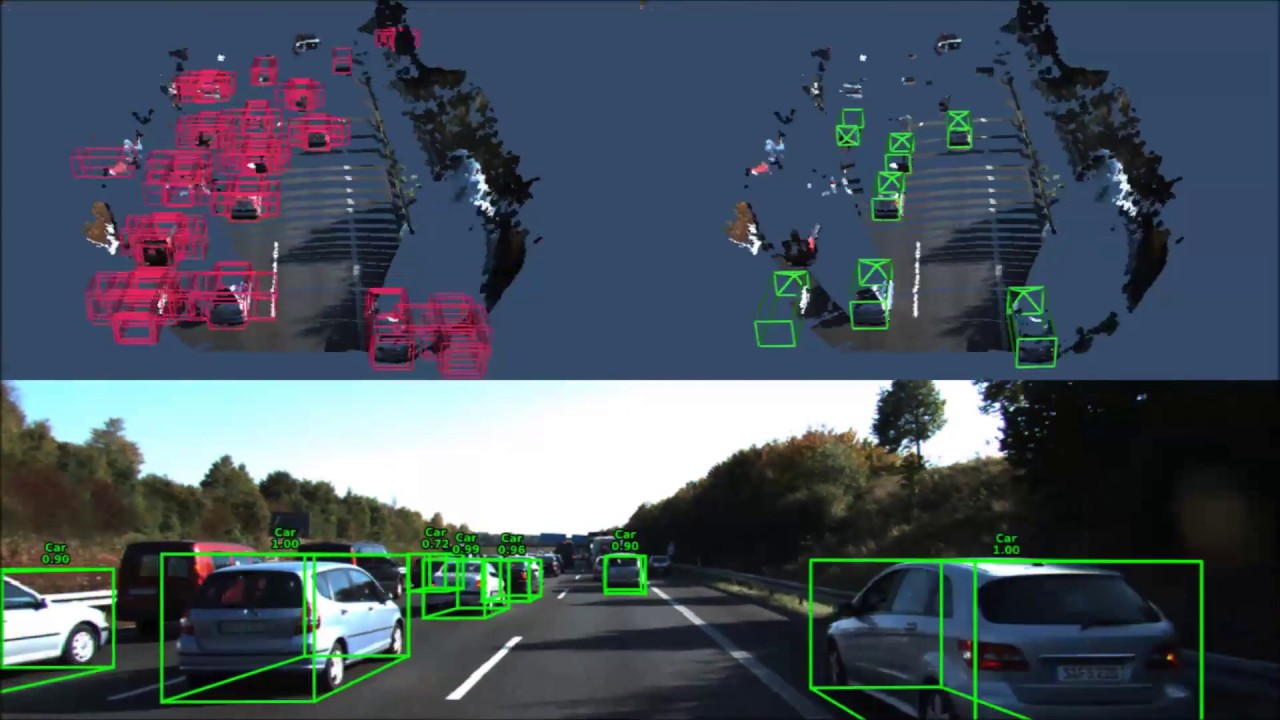
3d Object Detection/ Segmentation
Working on object detection and segmentation implemented with pointnet/pointnet++ algorithms with LIDAR pointcloud data